3D Robot Vision for BinPicking
In the field of automotive manufacturing, particularly in the production of clutch plates for cars and trucks, the forming process requires not only speed and efficiency but also high precision in the handling and orientation of components. Traditionally, operators manually picked the clutch plates from bins and placed them into hydraulic presses. However, this manual process came with several drawbacks — inconsistencies in part orientation, longer cycle times, and higher labor costs. To address these challenges, a fully automated 3D bin picking and vision-guided robotic system was designed and deployed, offering a robust solution that combines advanced vision technologies, precise servo-controlled mechanisms, and synchronized multi-robot operations. This system enhances productivity and ensures the accuracy necessary in the forming stage, which is crucial for the subsequent performance and longevity of the clutch assembly.
Process Overview:
The deployed system automates the complete handling sequence of clutch plates from the initial stacked state in the input bin to the final placement of formed components in the output bin. The process integrates 2D and 3D vision systems, a PLC-controlled orientation station, and four coordinated industrial robots, each assigned a specific role in the sequence.
At the beginning of the process, clutch plates, which have undergone initial heat treatment and pre-forming, arrive at the workstation stacked uniformly in an input bin. A pair of vision cameras is installed above the input bin to pick the parts from the bin.
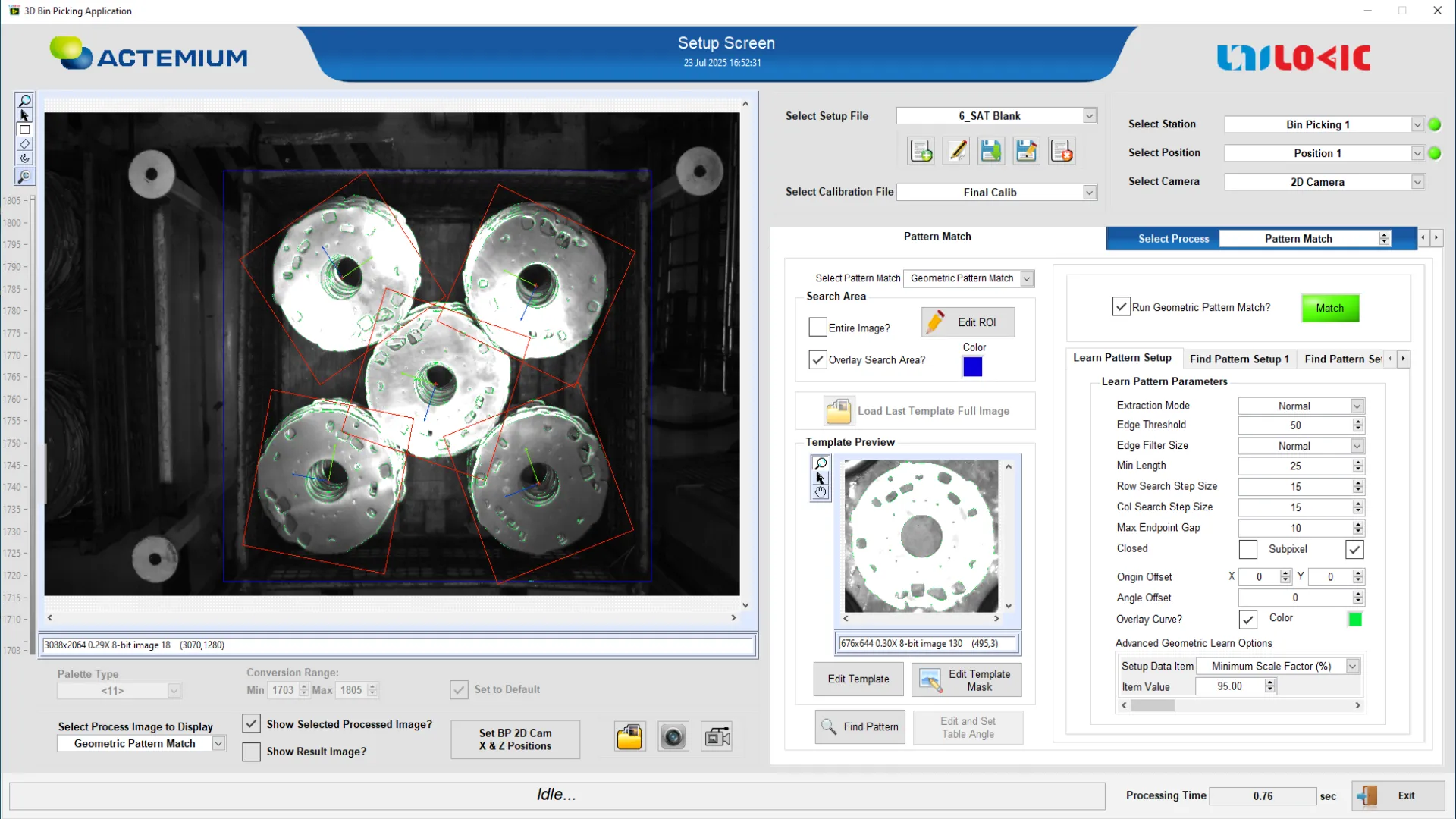
- A 2D area scan camera is used to detect the X and Y coordinates of the parts through pattern matching techniques.
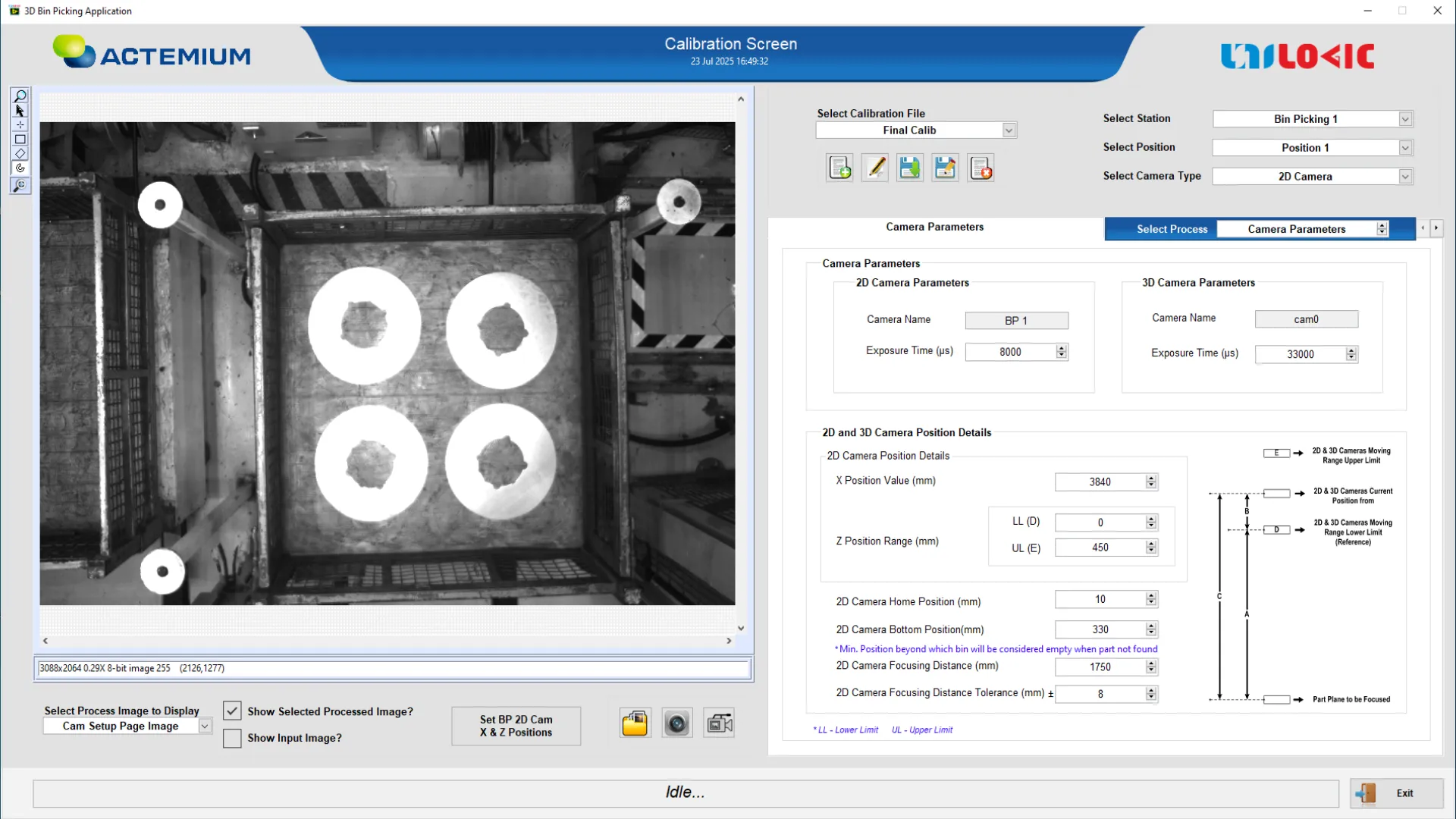
- A 3D vision camera measures the Z-height of the components and ensures that only the topmost, unobstructed part is picked up by the robot.
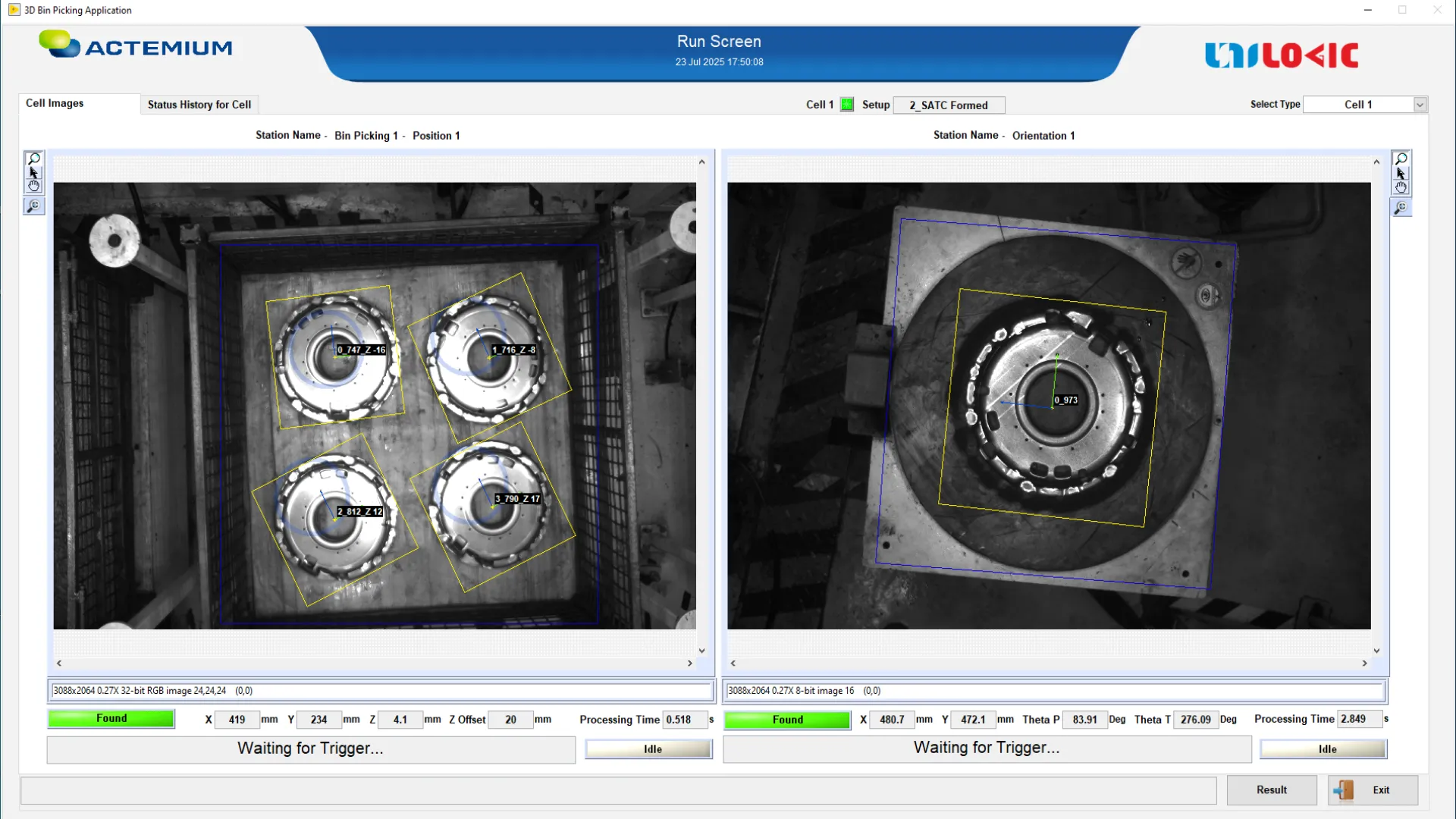
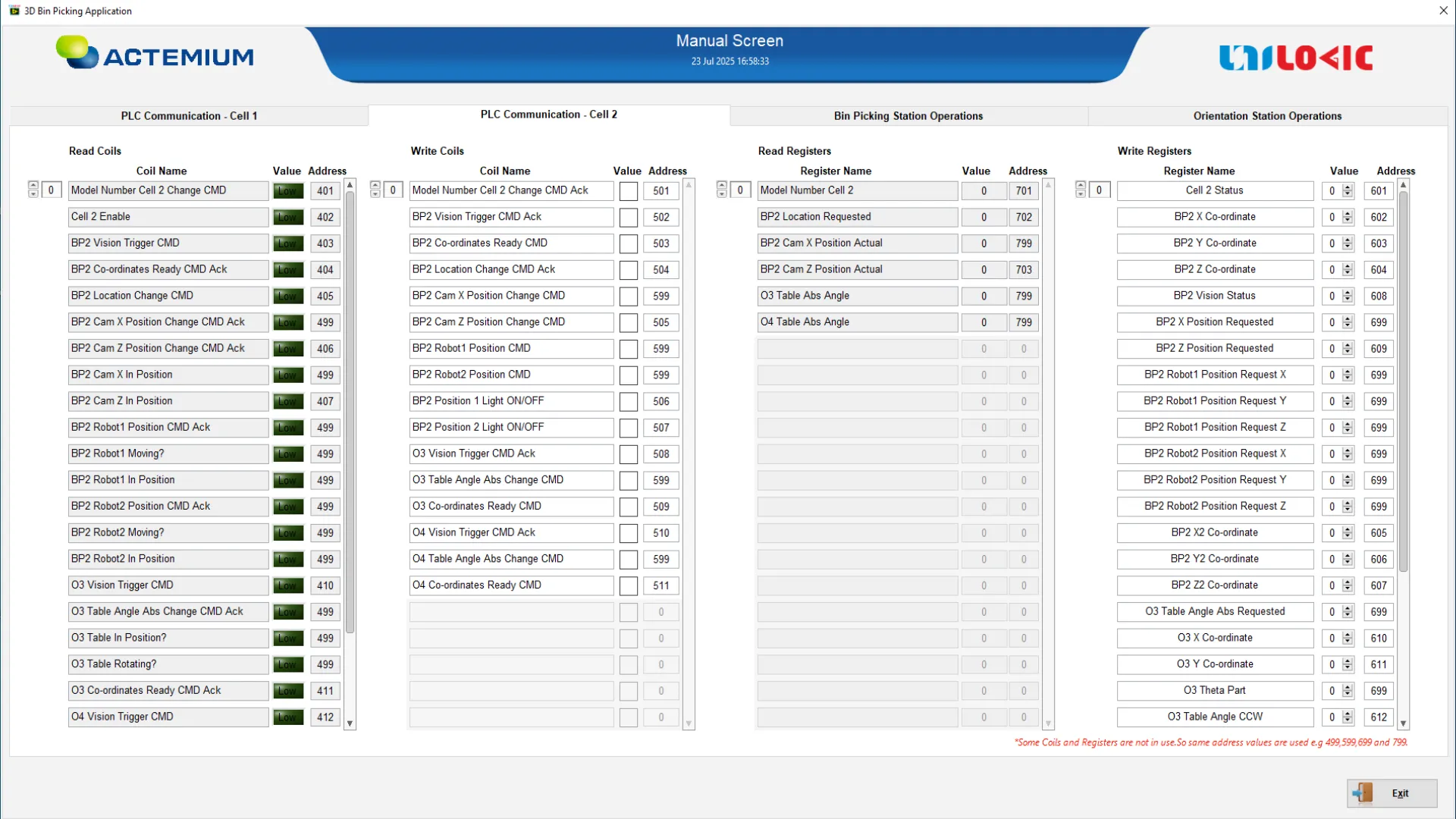
The 2D and 3D data are combined into an XYZ coordinate set and sent to the PLC, which communicates the information to the robot controller. This allows the robot to execute precise picking motions with high repeatability and minimal risk of collisions or mispicks.
After the part is picked, it is not yet ready for pressing, as its rotational orientation in the plane must match the forming press requirements. To achieve this, the robot places the part on an intermediate orientation verification station. This station comprises a servo-driven rotary table and an overhead 2D camera. The vision system performs detailed pattern matching to determine the angular misalignment of the part. The calculated correction angle is transmitted to the PLC, which commands the servo table to rotate the part accurately into the correct orientation. This intermediate station ensures that only correctly aligned parts are passed on to the forming presses, eliminating the possibility of defective forming due to misorientation.
Once the part is properly aligned, a second robot picks it from the orientation station and places it in the first hydraulic press. After the pressing cycle is complete, the formed part is moved to an intermediate table by the same robot. A third robot then takes the component from this table and places it into the second hydraulic press for the final forming operation. Following this final press, the component is placed onto a conveyor belt, which transports it towards the output area. At the end of the conveyor, a fourth robot picks the fully formed part and stacks it neatly into the output bin, completing the automated cycle.
|
Parameter |
Typical Value or Range |
Comments |
|---|---|---|
|
System Cycle Time |
~2 min per part |
Depends on press cycle time and orientation correction |
|
Input Bin Vision Resolution |
3D Camera: ~8 mm |
For Z-height measurement |
|
2D Camera: ~350 µm |
For XY coordinate detection |
|
|
Orientation Station Resolution |
2D Camera: ~250 µm |
High precision angular alignment |
|
Number of 3D Cameras |
1 |
Mounted above input bin |
|
Number of 2D Cameras |
2 |
One for bin picking, one for orientation verification |
Benefits:
- Accurate 3D detection of randomly placed parts
- Corrects orientation before pressing to ensure quality forming
- Eliminates manual handling, reducing errors and labor cost
- Improves throughput through consistent, fast cycle times
- Easily scalable for similar forming applications
Features:
- Integrated 2D and 3D vision systems for precise part localization
- Real-time XYZ and angle data exchange via PLC and robot interface
- Servo-driven rotary table for orientation alignment
- End-to-end automation from bin to final stacking with minimal human intervention
Conclusion:
The deployment of this fully automated 3D bin picking and vision-guided forming system has significantly enhanced the efficiency, accuracy, and reliability of the clutch plate forming process in the automotive manufacturing line. By leveraging advanced vision algorithms, servo-controlled orientation correction, and synchronized robotic handling, the system addresses the challenges of random part placement, variable orientation, and tight production schedules. This implementation exemplifies how cutting-edge automation technologies can transform traditional manufacturing processes, delivering consistent product quality and measurable productivity gains